2.30k ALIS
2.30k ALIS  10.50 ALIS
10.50 ALIS 


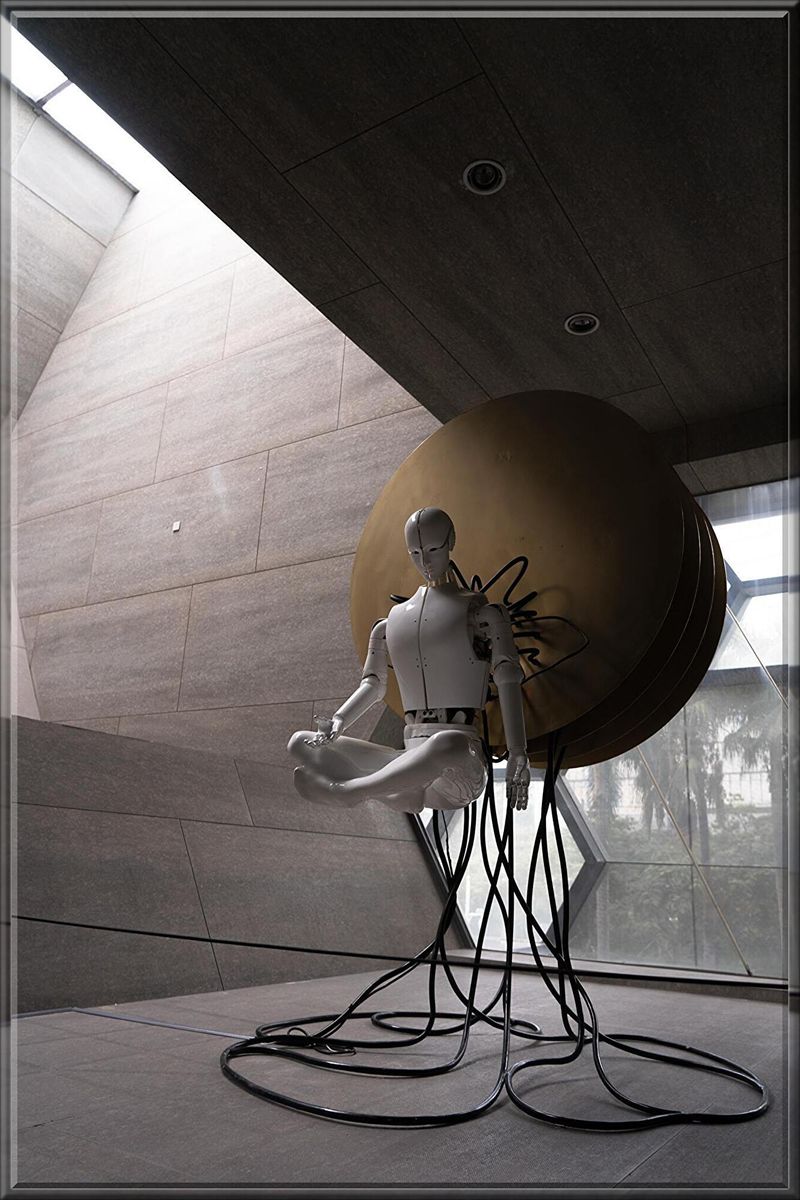
とうとうロボットが
痛みに反応して体を動かし
防御をとれるようになりました。
この痛みは
人間と同じ痛みを感じ
痛くなければ普通に動作します。
針でつつけば手を少し引き
強くたたけば手を引っ込めて
まるで人間と同じような
動作をするロボットです。
ロボットの痛みの度合いは
人間が痛いと感じる動作と
人間が痛いと感じる強さ等
数値化した物が使われてます。
痛みを数値化した方法は
ロボットの手に尖った物や
平べったい物や丸い物を装着し
実際に研究者達が攻撃されました。
攻撃された時のロボットの強さで
研究者たちが痛いと感じた時
その時痛みが始る強さにしました。
その痛みが始まる時の数値を基準に
ロボットが痛いと感じる動作を
行うように設定しました。
〓=〓=〓=〓=〓=〓=〓=〓=〓=〓
ロボットに痛みを感じた時
人間と同じ動作をするには
ロボットをセンサーだらけにし
全部計測しないとダメでした。
でもそれだと
情報量が膨大すぎて
コンピューターで処理しきれず
とても無理です。
しかしこのロボットは
センサーに反応したら
コンピューターで処理する前に
とりあえず動くようにしました。
そうする事により
センサーで反応した情報を
コンピューターで処理する必要が
全く無くなったのです。
この動作の仕方は
人間の体も同じ処理で
痛みを感じたらとりあえず
筋肉が動くようになってます。
その後脳が何が起こったのか
情報を得る為の行動を命令し
目で見たり触れてみたりして
原因が解るのです。
これと同じ事を
このロボットにもさせて
まるで人間と同じような
動作させる事に成功しました。

〓=〓=〓=〓=〓=〓=〓=〓=〓=〓
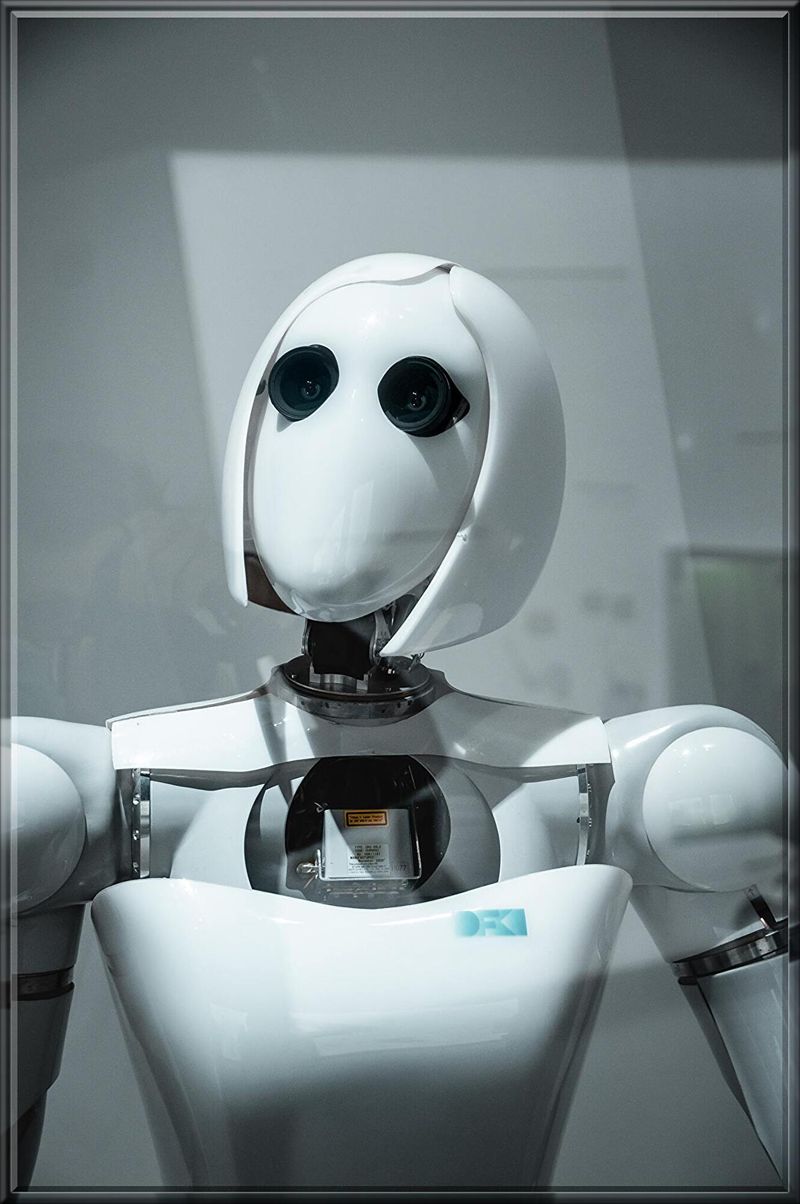
現在まだ
ロボットの手のひらにしか
疑似神経機能が付いてなく
ここしか反応してくれません。
この手のひらには
「シナプス・トランジスタ」が
168個付いてます。
これは
何かが触れた時の強さを
電気的に測れる物です。
このトランジスタは
薄いプラスチックに印刷されて
ロボットの手の表面に
ペタペタ貼られてます。
印刷の仕方は
トランジスタを細い棒にして
プラスチックに網目状に印刷し
まんべんなくついてます。
このトランジスタは
酸化亜鉛という物で出来てて
触れると流れる電気量が減少し
ロボットが触れたと解ります。
そして強く触れると
流れる電気量がさらに減少し
その時痛いと感じる動作を
行うように設定してます。
〓=〓=〓=〓=〓=〓=〓=〓=〓=〓
ロボットに痛みを感じさせるなんて
可哀そうな気もしますが
我々人間界に入る為には
痛みが解らないと危険です。
人間も幼い頃は
痛い思いをしながら学習し
幼い頃に学習できなければ
大人になって色々激痛くらいます。
炎に触っちゃいけないと解るのは
炎に触ると熱いと感じる
痛みの感覚があるおかげです。
ロボットだってこの痛みの感覚を
きちんと理解しなければ
いざという時壊してしまったり
ロボット自身も壊れてしまいます。
研究者たちは
ロボットに痛みを感じさせる
このシステムが完成すれば
義肢にも応用できると言います。
更に人間が行けない場所の探索や
危険な物の見極め等
人間に代わってロボットが行い
より安全な作業が可能。
もしかしたら近い将来
機械の腕や足がつけられて
全く義肢と解らない人と同じ動作を
自然に行えるようになるでしょう。
2人がサポートしています
6.30 ALIS