2.30k ALIS
2.30k ALIS  10.50 ALIS
10.50 ALIS 

ロボットが
人と同じ感覚を持てる
センサーが開発されました。
感知できる感覚は
温度
硬さ柔らかさ
物の形等
この様に人と全く同じ
感覚が理解できる物です。
現在ロボットは
人間みたいに動けと命令を出し
その動きの情報を再現する
アウトプット動作が可能です。
しかし
人が命令した事以外の情報を検知し
自力で理解するインプット技術は
凄く困難を極めています。
そんな中
人間のみたいに触覚を検知する
伸縮性のある人工皮膚が
完成しました。

〓=〓=〓=〓=〓=〓=〓=〓=〓=〓
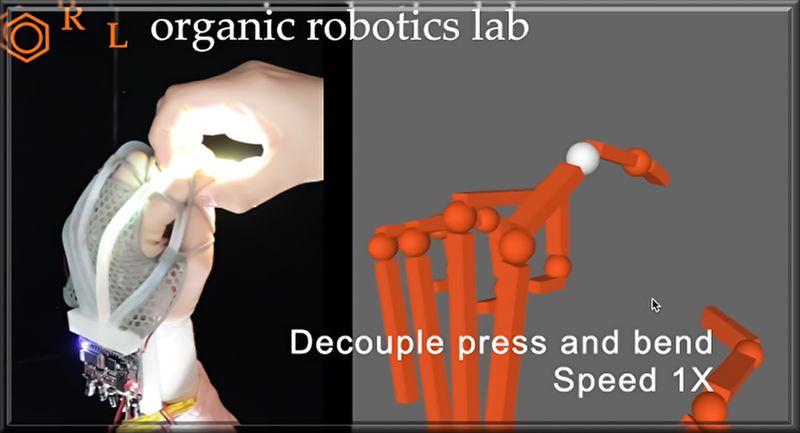
構造は
伸縮性があるシリコンの中に
光ファイバーセンサーを埋め込みます。
そのセンサーが
「光の量」「光の波長」
「光の角度」「光の広がり方」「光の色」等
あらゆる情報を検知します。
その情報を元に
コンピューターが
物質の「硬さ」「形」「温度」等を
理解します。
しかもこれは
光のその物がセンサーになっています。
ですので光を出した場所から
光が届く場所まで
どの部分でも変化があれば
光が変化してスグに検知出来ます。
なので開発者達は
いちいち物の形をプログラムし
物の情報を機械学習させて
ロボットに理解させる必要が無くなります。
これは
ロボット開発が
一足飛びに進化するものかもしれません。
〓=〓=〓=〓=〓=〓=〓=〓=〓=〓
これを開発したのは
メリカ・コーネル大学機械工学部の
「ロブ・シェパード」氏
彼は
11月13日に科学誌の「Science」で
人間の様に伸縮性がある人工皮膚を開発したと
発表しました。
この人工皮膚を
ロボットに応用すれば
ロボットにも人と同じ感覚を持たせる事が出来る
と言っています。
現在は
人の動きをそのまま真似して
人とそっくりに
ロボットを動かす事が出来ます。
でもこれだけでは
人間特有の繊細で細かい感覚を
ロボットに理解してもらう事が出来ません。
もっとロボットに
人間っぽくなってもらうには
物を掴んだり触ったりした時の
感覚を与えてあげる事が必要です。

〓=〓=〓=〓=〓=〓=〓=〓=〓=〓
このセンサーの発明は
革新的な物です。
確かに今までにも
これと同じ事が出来る
センサーはありました。
「温度センサー」
「光センサー」
「圧力センサー」
でも
従来のこのセンサーでは
人間の様に繊細で微妙な感覚が
得られませんでした。
しかし今回開発された物は
人の目で処か
高性能コンピューターを使わないと
検知出来ない情報を検知します。
今回開発されたこのセンサーは
「伸縮性分布型光ファイバセンサー」と
名づけられました。
舌噛みそうな名前です。
〓=〓=〓=〓=〓=〓=〓=〓=〓=〓
今回開発されたセンサーは
光ファイバーの発展型です。
光ファイバーは
光を通す繊維になっています。
この光回線に使用されている
光ファイバーは
電気信号を光に変えて伝えてくれます。
光ファイバーの構造は
光信号を正確に伝える為に
外部から信号伝達の邪魔になる
影響を受けない処理がされています。
しかし今回開発された物は
その逆です。
外部からの影響を受けない処理を
全部はがして
あらゆる物の影響を受けさせて
その影響を光の変化で検知させます。
これが
「光ファイバセンシグ」
と言う技術です。
〓=〓=〓=〓=〓=〓=〓=〓=〓=〓
「光ファイバセンシグ」技術の中に
「DFOS」と言う技術があります。
これは
部分的な観測ではなく
センサーの光の場所ならどこでも
常時変化し続ける状態が常に観測できます。
今この技術が使われている場所は
高速道路の全ての場所の全ての箇所で
常にどんな形に変化し続けるかの観測等に
使われています。
その他にも
橋や建物や機械の観測にも使われています。
「伸縮性分布型光ファイバセンサー」は
この技術を小型化して
触覚センサーに応用した物です。
しかも
製造費や維持費がとても安くでき
コストがとても低いという特徴があります。

〓=〓=〓=〓=〓=〓=〓=〓=〓=〓
この技術は
あらゆる場所で役に立ちます。
今後開発されるであろう
自動手術ロボットや
義手や
全身体感スーツなど。
VRを付けて
触った感覚を得られる服を着れば
その先にあるロボットを操作して
実際に動作した時の感覚を味わえます。
見てる映像のペットを抱きかかえれば
実際に触っている感触や
ペットが動いている感触を味わえます。
ロボットを遠隔操作しても
色々な食材の質感が解り
正確に料理を作ってあげる事も出います。
相手側が人でも同じ事が出来
バーチャル風俗が誕生するかもしれません。
もしそれが出来るなら
自宅に居ながら
個人で風俗店や料理店や製造業を
開業させられるかもしれませんね。
(*´艸`)ムフフ

0人がサポートしています
0.00 ALIS